Teams
RIOTU Teams bring together diverse expertise to innovate, collaborate, and drive cutting-edge research and development
Main Research Areas
- Autonomous navigation in indoor and outdoor environment
- GNSS-denied localization
- Robust target detection and tracking for aerial targets
- AI-Powered trajectory prediction of aerial targets
Recent Works
SMART-TRACK: A Novel Kalman Filter-Guided Sensor Fusion for
Robust UAV Object Tracking in Dynamic Environments
DOI: https://doi.org/10.1109/JSEN.2024.3505939
Video: https://www.youtube.com/watch?v=7ZM_gwgNcZg
Code: https://github.com/mzahana/smart_track
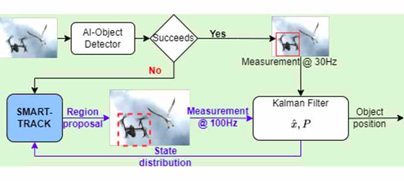
Our Solution: We introduce SMART (Sensor Measurement Augmentation and Reacquisition Tracker), a novel approach that ensures robust tracking even when direct measurements falter. By leveraging high-frequency state estimates from a state estimator such as a Kalman filter, SMART guides the search for new measurements, maintaining continuity and stability in dynamic environments. Key innovations include:
- Versatile measurement augmentation: A backup system that adapts to various sensors, integrating nonlinear covariance propagation techniques for enhanced reliability.
- Open-source ROS2 implementation: The SMART-TRACK framework, validated in realistic simulations, offers significant improvements in tracking stability, with estimation errors as low as 0.04 m during measurement disruptions.
VECTOR: Velocity-Enhanced GRU Neural Network for Real-Time
3D UAV Trajectory Prediction
DOI: https://doi.org/10.3390/drones9010008
Video: https://youtu.be/lyjwHDWOKs4?feature=shared
Dataset: https://huggingface.co/datasets/riotu-lab/Synthetic-UAV-Flight-Trajectories
Training Code: https://github.com/riotu-lab/GRUTrajectoryPredictor
ROS2 package: https://github.com/mzahana/drone_path_predictor_ros
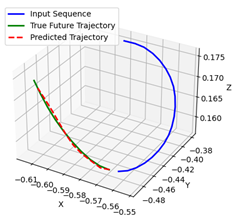
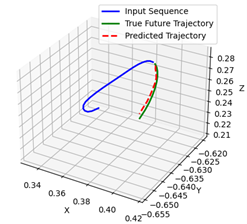
Our Solution: We introduce a novel trajectory prediction scheme that leverages velocity estimates and first-order dynamics to significantly enhance prediction accuracy and generalizability. Using Gated Recurrent Units (GRUs), our approach forecasts future velocity and positions based on historical velocity data, outperforming traditional methods that rely solely on position measurements or less scalable models like RNNs and transformers.
Key highlights:
- Superior accuracy: Achieves a mean square error (MSE) as low as 2×10−8, surpassing state-of-the-art RNN models.
- Robust generalizability: Effective across diverse UAV agility, curvature, and speed patterns, both within and outside training position domains.
- Open-source contributions: We release a 5000-trajectory dataset and a ROS2 package to enable seamless integration with existing UAV systems, fostering further research and real-world applications.
FLIGHTGEN: ROS2-Powered Automated UAV Dataset
Generator
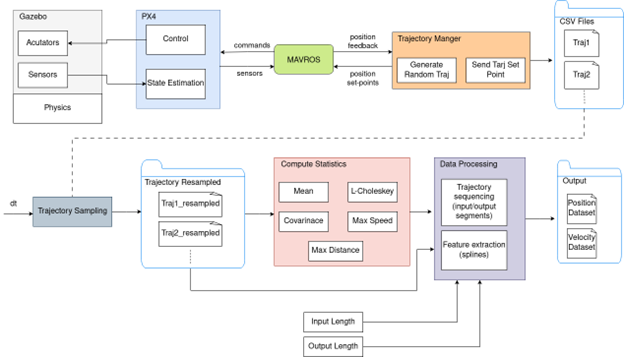
Our Solution: We introduce a comprehensive, open-source simulation framework that bridges this gap by integrating ROS 2, the Gazebo robotics simulator, and PX4 open-source autopilot. This highly modular framework enables the generation of an arbitrary number of UAV trajectories with user-defined characteristics, producing realistic simulations and high-quality synthetic datasets.
Key highlights:
- Extensive dataset: Includes over 5000 random UAV trajectories across 20 hours of simulated flight, ready for AI training.
- Robust preprocessing: Supports uniform resampling, statistical normalization, and trajectory segment generation, ensuring dataset readiness.
- Open-source implementation: Provides flexibility for users to customize datasets and adapt the framework to their needs.
Code (ROS package): https://github.com/mzahana/uav_dataset_generation_ros
DOI: Coming soon
Team Members
Main Research Areas
Our research focuses on Computer Vision, Generative AI, Visual and Multimodal Language Models, Image Generation, and Image Restoration. We apply these technologies directly to solve challenges in Healthcare, Smart Transportation, and Smart Cities.
Recent Works
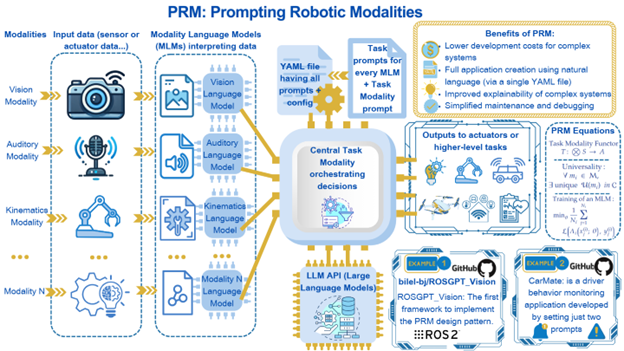
Prompting Robotic Modalities (PRM): A Structured Architecture for Centralizing Language Models in Complex Systems
- Journal: Future Generation Computer Systems (Q1, Impact Factor: 6.2)
- ISI Ranking: Top 10% in Computer Science, Theory & Methods
- DOI: https://doi.org/10.1016/j.future.2025.107723
- GitHub Repository: ROSGPT_Vision
-
Key Contributions:
- Introduced the PRM architecture integrating language models with computer vision and robotics.
- Developed ROSGPT_Vision, an open-source ROS 2 package achieving up to 66% classification accuracy in driver-focus monitoring.
- Real-world application: CarMate driver-distraction detection, reducing development time and cost through prompt adjustments.
- Recognized for establishing a new benchmark in robotic systems architecture.
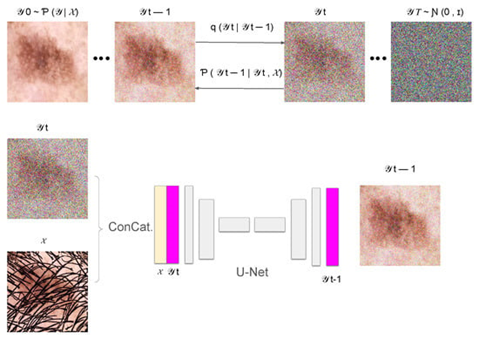
DM–AHR: A Self-Supervised Conditional Diffusion Model for AI-Generated Hairless Imaging for Enhanced Skin Diagnosis Applications
- Journal: Cancers (Q1, Impact Factor: 4.5)
- DOI: https://doi.org/10.3390/cancers16172947
- GitHub Repository: DM-AHR
-
Key Contributions:
- Developed DM–AHR, a diffusion model for generating hairless dermoscopic images, improving diagnostic clarity.
- Introduced DERMAHAIR dataset to advance dermatologic imaging research.
- Enhanced image quality, leading to improved skin lesion diagnostic accuracy.
- First to integrate a self-supervised learning strategy for this domain.
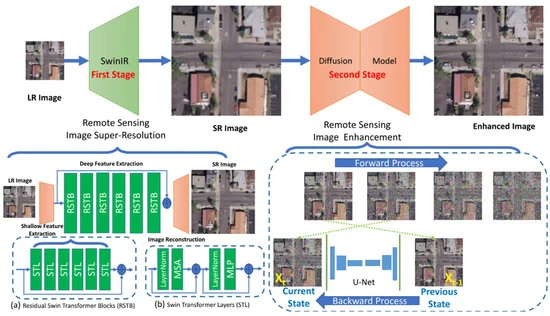
TESR: Two-Stage Approach for Enhancement and Super-Resolution of Remote Sensing Images
- Journal: Remote Sensing (Q1, Impact Factor: 5.35)
- DOI: https://doi.org/10.3390/rs15092346
- GitHub Repository: TESR
-
Key Contributions:
- Designed TESR, leveraging Vision Transformers (ViT) and Diffusion Models for remote sensing image enhancement.
- Outperformed state-of-the-art methods in super-resolution tasks, achieving significant improvements in PSNR/SSIM metrics across multiple scales.
- Demonstrated the effectiveness of TESR on the UCMerced benchmark dataset.
- Source code is openly available to the community.
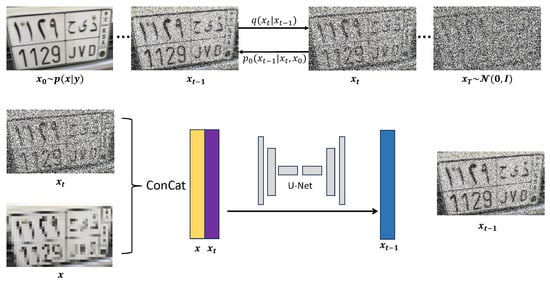
DiffPlate: A Diffusion Model for Super-Resolution of License Plate Images
- Journal: Electronics (Q2, Impact Factor: 2.9)
- DOI: https://doi.org/10.3390/electronics13132670
-
Key Contributions:
- Introduced DiffPlate, a novel diffusion-based super-resolution model tailored for license plate enhancement.
- Achieved up to 37.32% improvement in PSNR and 16.21% in SSIM over SwinIR and ESRGAN.
- Validated on a curated dataset of Saudi license plates for real-world surveillance applications.
- Human evaluations confirmed DiffPlate’s effectiveness, with 92% of users preferring its outputs.
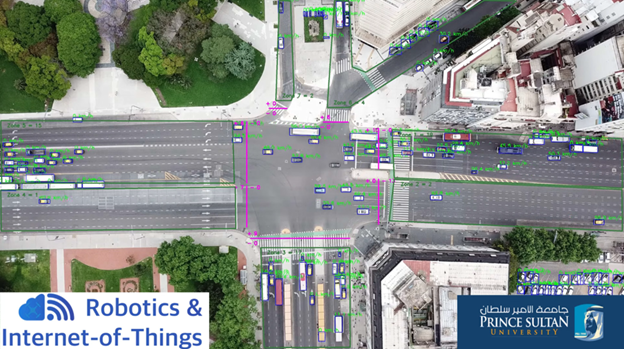
TAU: A Framework for Video-Based Traffic Analytics Leveraging AI and Unmanned Aerial Systems
- Journal: Engineering Applications of Artificial Intelligence (Q1, Impact Factor: 7.8)
- ISI Ranking: Top 10% in Automation & Control Systems
- DOI: https://doi.org/10.1016/j.engappai.2022.105095
- GitHub Repository: TAU
- Video: A Framework for Traffic Analysis from UAV
- ScienceCast: Science Cast
-
Key Contributions:
- Developed TAU, an AI-powered video analytics framework for UAV-based traffic monitoring.
- Introduced six major innovations, including high-resolution object detection, vehicle tracking, speed estimation, and crossroad arbitration.
- Extracts 24 key traffic insights for real-time analytics, including heatmaps and histograms.
- Offers a ready-to-use tool for transportation engineers to optimize traffic management.
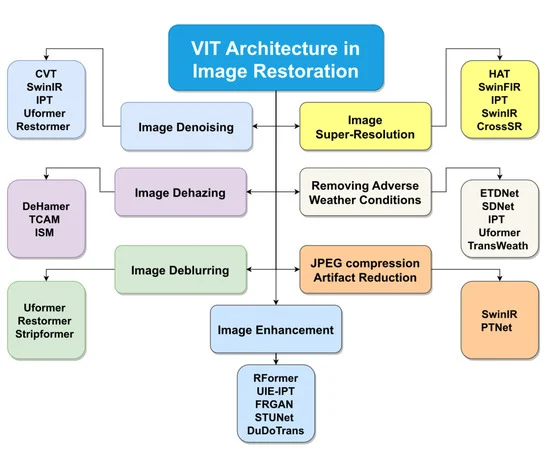
Vision Transformers in Image Restoration: A Survey
- Journal: Sensors (Q1, Impact Factor: 3.9)
- DOI: https://doi.org/10.3390/s23052385
-
Key Contributions:
- Comprehensive study of Vision Transformer (ViT) applications in seven image restoration tasks.
- Highlights ViT’s advantages over CNNs, including robustness in feature extraction and better generalization.
- Identifies key challenges such as computational cost and training difficulty, paving the way for future research.
- Serves as a reference guide for integrating ViT in next-generation image restoration models.
Team Members
Main Research Areas
- Training and fine-tuning of Arabic Large Language Models
- Natural Language Processing (NLP)
- Data collection and curation for Arabic (Modern Standard Arabic and dialects)
- Machine Translation
- Semantic Embeddings
- Reverse Dictionary
- Information Retrieval and Reranking
- Cross-lingual fine-tuning for Arabic-English tasks
- Customization for industry-specific domains
- Ethical and cultural alignment for Arabic use cases
Recent Works
Large Language Models (LLMs) for Arabic
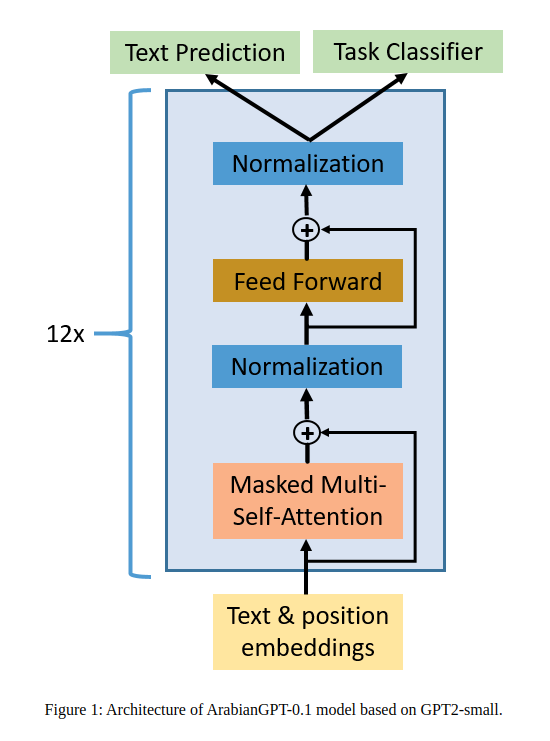
1. ArabianGPT: A native Arabic GPT-based
model designed for better language understanding.
2. LLM Hallucination Detection: Investigating whether Arabic LLMs can identify their own hallucinations.
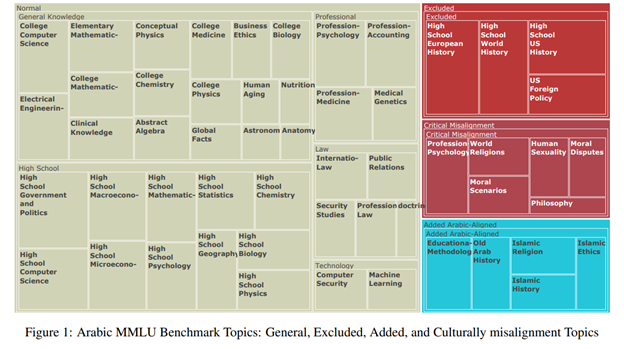
3. Benchmarking Arabic LLMs: Developing culturally aligned evaluation methods for Arabic LLMs.
Arabic Legal and MSA Processing
1. Arabic Legal Rulings Prediction: Applying
LLMs to predict legal rulings in Arabic texts.
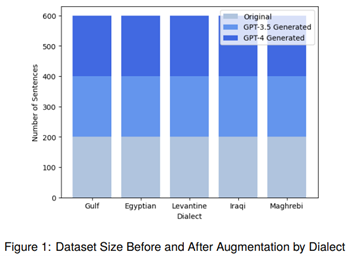
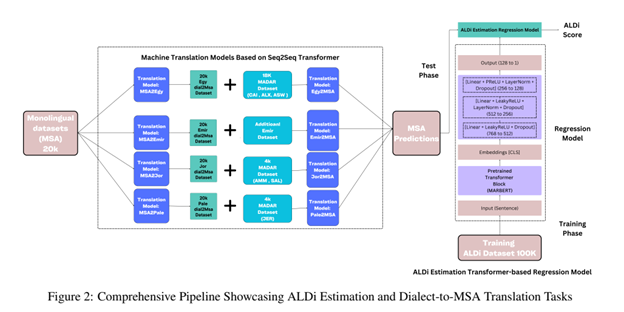
2. Dialect-to-MSA Translation: Enhancing translation through data augmentation and dialect estimation techniques.
Arabic-Specific NLP Applications
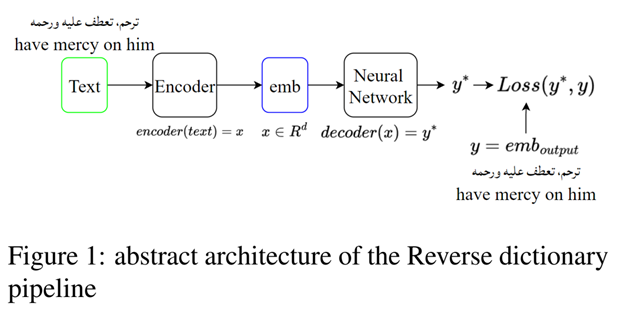
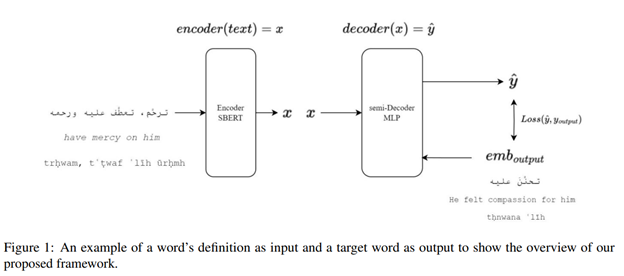
1. Reverse Dictionary Model (Qamosy):
Utilizing SBERT for reverse dictionary tasks.
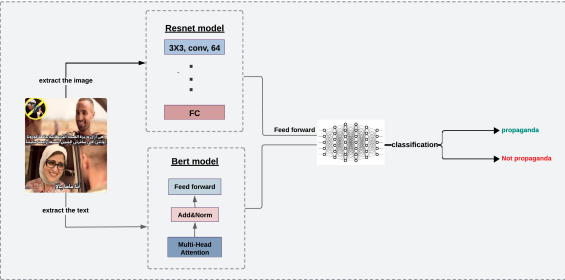
2. Multimodal Propaganda Detection: Integrating text and image embeddings for identifying propaganda in Arabic memes.
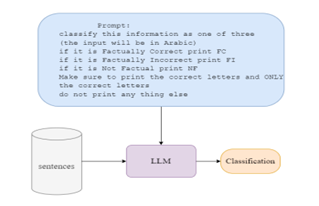
3. Arabic Disinformation Detection: Using BERT and GPT-4 for Arabic-specific fact-checking.
Computational and Embedding-Based Approaches
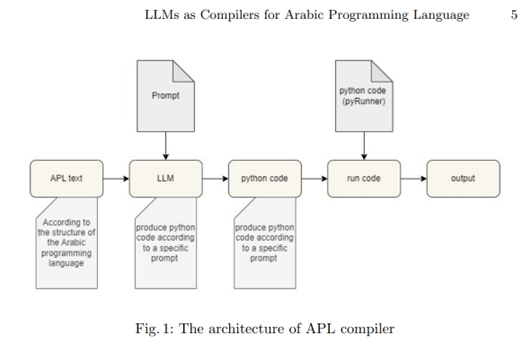
Arabic Programming Language Compilation:
Exploring LLMs as compilers for Arabic-based programming
languages.
Team Members
Main Research Areas
The team focuses on Intelligent Transportation Systems (ITS),
emphasizing leveraging advanced computational techniques for
efficient urban mobility. Key areas of interest include:
Game Theory for Smart Mobility
- Strategic traffic congestion avoidance
- Incentive-based vehicle rerouting strategies
- Equilibrium-based traffic management solutions
Smart Parking & Urban Space Optimization
- AI-driven parking availability prediction
- Efficient parking allocation using real-time data
- UAV-assisted smart parking management
V2X & Connected Vehicles
- Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communications
- Enhancing safety and efficiency through cooperative driving
- Edge-based decision-making for real-time navigation
Autonomous & AI-Driven Traffic Management
- AI-based traffic prediction and control
- Reinforcement learning for adaptive traffic systems
- Swarm intelligence for coordinated vehicular movement
Quantum & Edge Computing for ITS
- Quantum-inspired traffic congestion solutions
- Distributed learning in edge-based transportation networks
- Scalable ITS architectures for high-mobility environments
Recent Works
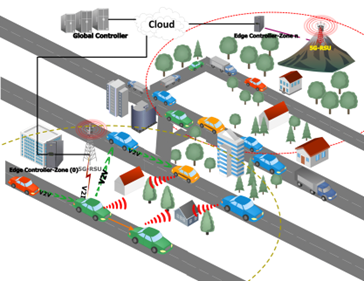
RADAR (Rapid Discovery Algorithm for Routes) is an advanced application of Intelligent Transportation Systems (ITS) designed to enhance real-time vehicular communication and traffic management. Built on the heuristic Θ* algorithm, RADAR operates within a three-layered Software-Defined Networking (SDN) architecture to ensure seamless route discovery in dynamic environments. By leveraging V2V, V2I, and 5G-RSU technologies, it rapidly adapts to abrupt link failures and topological changes, optimizing traffic flow and minimizing congestion. This approach enhances road safety, reduces travel time, and supports the efficient navigation of connected and autonomous vehicles in smart city infrastructures.
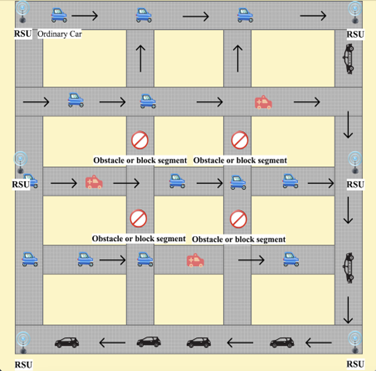
This work introduces a heuristic and scalable route planning scheme for Intelligent Transportation Systems (ITS), enhancing traffic flow and data communication in urban networks. The Heuristic Street Planning Scheme (H-SPS) leverages the A* algorithm for dynamic traffic control, reducing street discovery time and overhead compared to conventional methods. Meanwhile, HS-RAODV (Heuristic Scalable Reliable Ad hoc on Demand Distance Vector) extends CEG-RAODV, integrating A* for efficient, scalable, and reliable vehicular communication. By enabling adaptive rerouting, congestion-aware navigation, and seamless V2V/V2I connectivity, this scheme optimizes road utilization and enhances real-time decision-making in ITS.
Team Members
Main Research Areas
The Smart Urban SysTems, AI and IoT Networks (SUSTAIN) research team focuses on:
- AI, IoT & Smart Systems for Sustainability – Developing AI-driven solutions for smart cities, healthcare, and food distribution, fusing IoT, federated learning, and blockchain technologies for efficient decision-making.
- Edge-Cloud & Quantum Computing for Low-Latency AI – Optimizing computational models for real-time AI processing in IoT environments.
- Privacy-Preserving & Federated AI in Healthcare – Advancing federated learning and deep learning for secure, distributed medical analysis.
Recent Works
- Hybrid Deep Learning for Secure and Efficient Healthcare Internet of Things.
- AI-Driven Healthcare Analytics Using Federated Learning.
- Investigated the Impact of Data Heterogeneity on Federated Learning in Medical Imaging.
- Developed Models for Breast Cancer Screening and Multi-Class Disease Detection.
- Energy-Efficient Federated Learning For Green Intelligent Transportation System.
Team Members
Main Research Areas
The Smart IoT sYstems Enhanced with Next-gen AI Processing and
Service Engineering (SYNAPSE) focuses on developing cutting-edge
technologies that integrate artificial intelligence, the
Internet of Things (IoT), and distributed computing to enhance
the efficiency, security, and intelligence of modern digital
ecosystems. The research efforts of this team contribute to the
advancement of AI, IoT, and distributed computing, impacting
sectors such as smart cities, healthcare, agriculture, and
industrial automation.
1. Internet of Things (IoT) Applications and Next-Gen Distributed Systems
- Development of scalable and secure IoT architectures for smart cities, healthcare, and industrial automation.
- Research on efficient data management, real-time analytics, and edge computing in distributed IoT environments.
- Enhancing IoT security and reliability through advanced anomaly detection and threat mitigation techniques.
2. Advances in AI Technologies
- Integration of AI-driven automation for intelligent decision-making in various domains.
- Application of AI in predictive analytics, optimization, and intelligent control systems.
- Research on AI-powered perception and adaptation in autonomous and IoT-enabled systems.
3. Service-Oriented Computing
- Development of service-oriented architectures to enhance interoperability and efficiency in distributed systems.
- Optimizing web and cloud-based services for seamless integration of IoT and AI applications.
- Research on microservices and serverless computing for enhanced system scalability and flexibility.
4. Advanced Learning Models for Smart Systems
- Exploration of deep learning, reinforcement learning, graph-neural networks and self-supervised learning for smart automation.
- AI-driven models for anomaly detection, predictive maintenance, and intelligent resource allocation.
- Development of adaptive learning algorithms for IoT-enabled smart environments.
- Research on scalable graph-neural networks architectures to improve decision-making in dynamic, real-world systems.
Recent Works
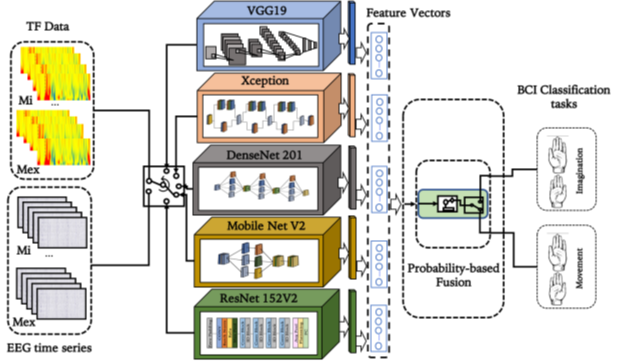
Finger Pinching and Imagination Classification: A Fusion of CNN Architectures for IoMT-Enabled BCI Applications
- This research presents a deep learning-based method for classifying finger pinching and imagination tasks using Brain-Computer Interface (BCI) signals.
- The method integrates Convolutional Neural Networks (CNNs) with IoMT (Internet of Medical Things) to improve the accuracy of gesture recognition in neuroprosthetic and assistive applications.
- The fusion of multiple CNN architectures enhances feature extraction from EEG signals, leading to high classification accuracy.
- The results demonstrate significant improvements in BCI performance, particularly for applications in rehabilitation and human-computer interaction.
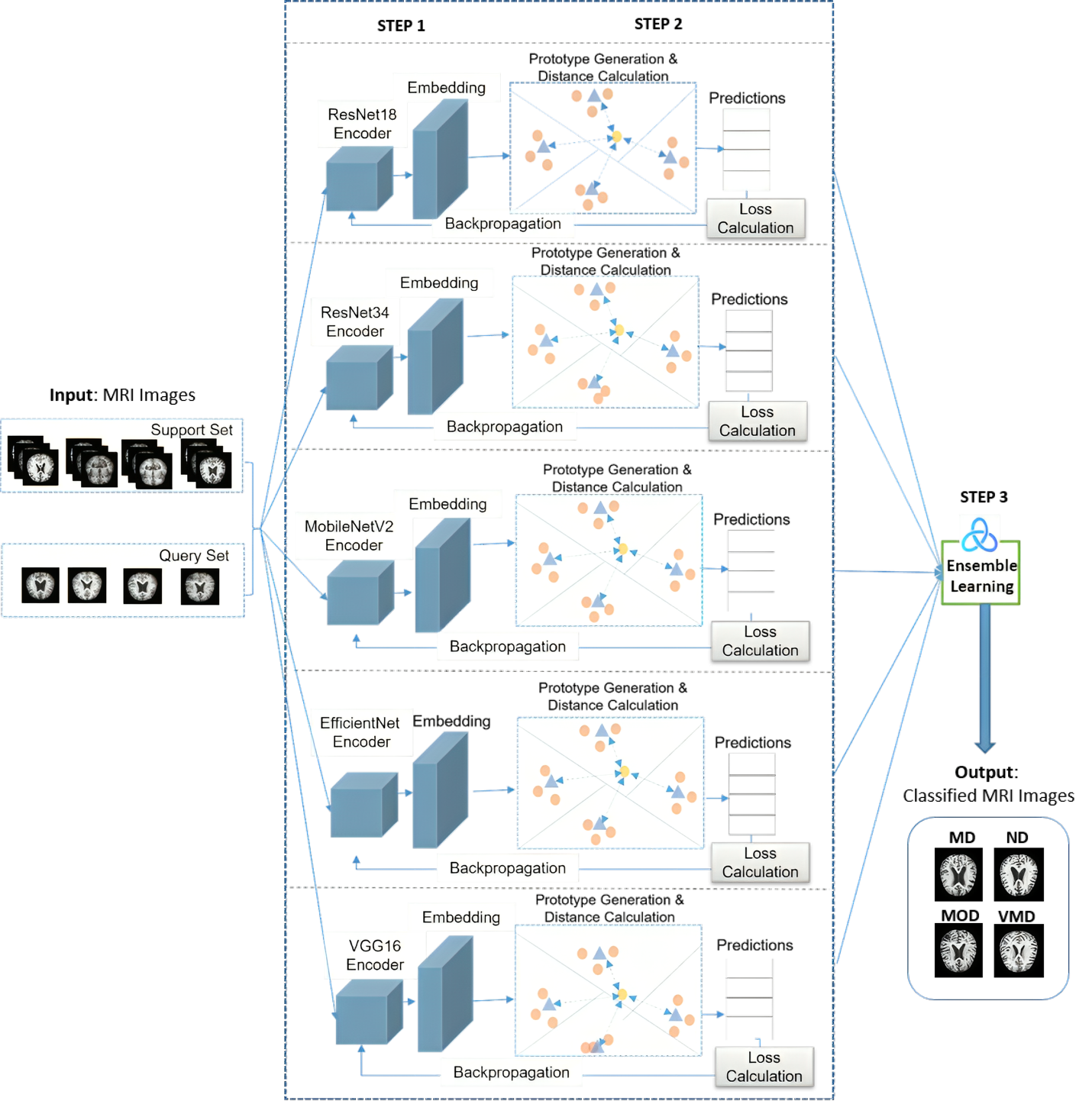
Enhancing Early Alzheimer's Disease Detection Through Big Data and Ensemble Few-Shot Learning
- This study explores the application of big data analytics and ensemble few-shot learning techniques for the early detection of Alzheimer’s Disease (AD) in IoMT ecosystems.
- The approach focuses on improving classification accuracy in medical imaging and clinical data with limited labeled samples.
- The proposed model integrates deep learning architectures to enhance diagnosis efficiency, particularly in scenarios where acquiring large training datasets is challenging.
- The results demonstrate improved diagnostic performance, making the system viable for real-world medical applications.
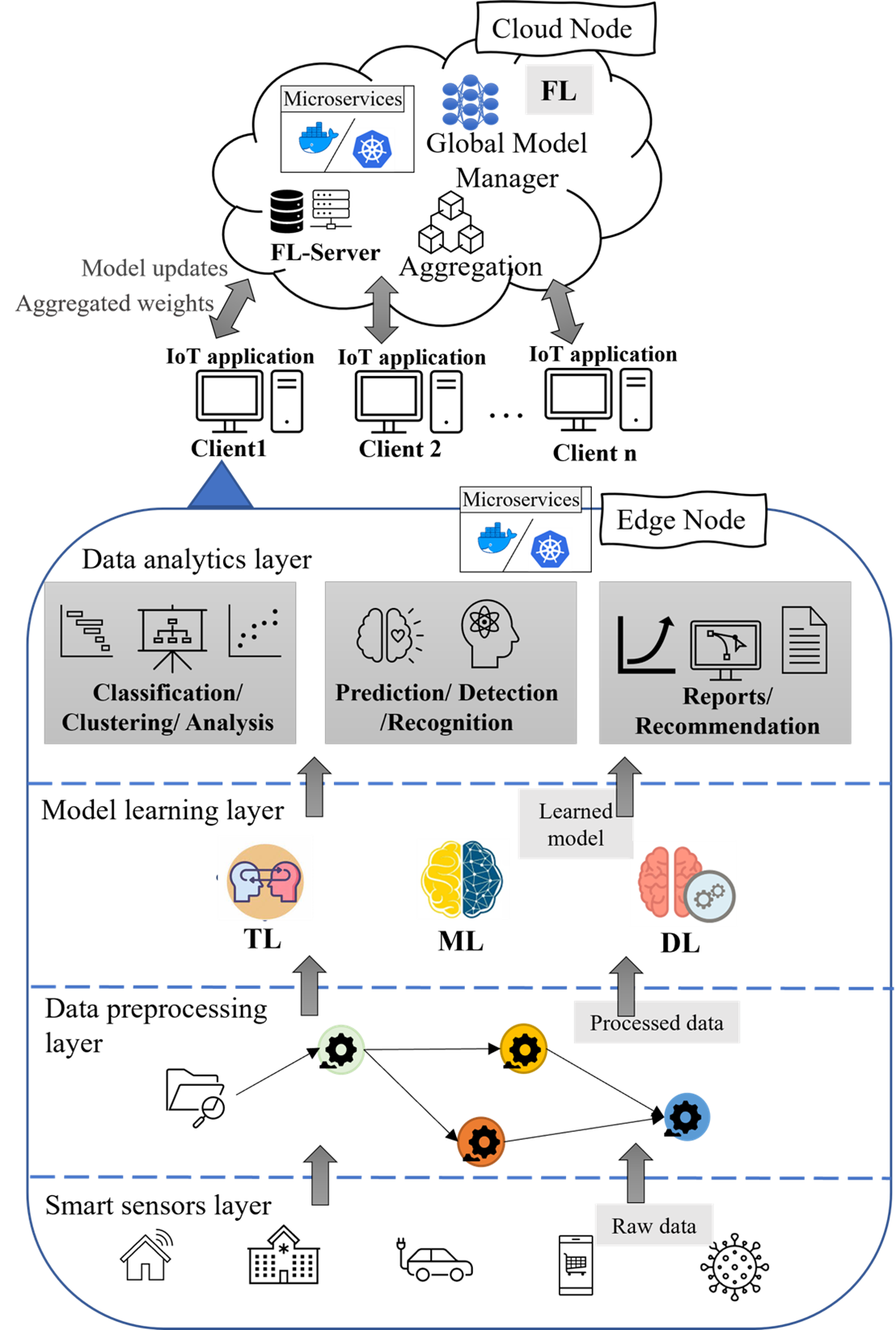
FedMicro-IDA: A Federated Learning and Microservices-Based Framework for IoT Data Analytics
- This paper introduces FedMicro-IDA, a federated learning-based framework designed for IoT data analytics.
- The model leverages microservices architecture to provide scalability, security, and distributed processing across IoT networks.
- By using federated learning, the approach ensures privacy-preserving training of AI models without transferring raw data, making it suitable for edge computing environments.
- The study highlights the efficiency of FedMicro-IDA in real-time data analytics across IoT-enabled systems.